publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2026
2025
- ICCVIn Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025
2024
- In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
2022
- Advances in Neural Information Processing Systems, 2022

2021
- IEEE Journal of Selected Topics in Signal Processing, 2021
2020
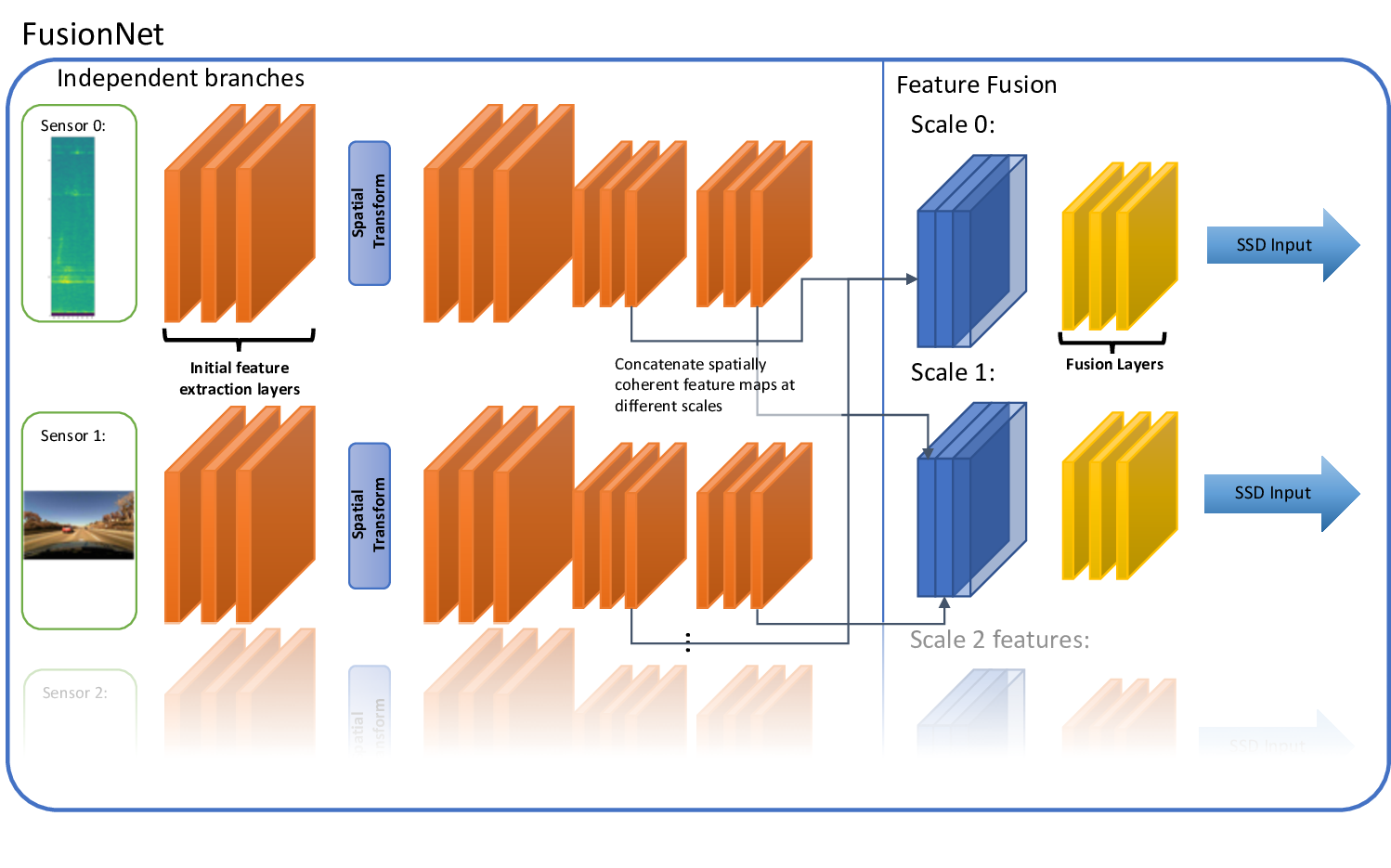
- Early fusion of camera and radar frames2020US Patent App. 16/698,601
2019
-
 In NeuRIPS2019 ML4AD Workshop, 2019
In NeuRIPS2019 ML4AD Workshop, 2019

2018
- In 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2018
- In 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2018

2017
- In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition (CVPR), 2017
